Cyborg Lobster
Posted: October 6, 2018
Introduction
A couple weeks ago while at the grocery store, I stumbled upon a couple of lobsters precooked and frozen in a package. I've never had whole lobster like this before and they were cheap so I decided to try them. After eating the meat from the tail and claws I started to feel bad for it... its only crime was grabbing some food from a trapper's cage. I decided I should put it back together and bring it back to life with an Atmel ATtiny85 for a new brain.
This ended up being quite a disgusting project, probably not as gross as the Singing Fish but still pretty nasty. When I separated the body from the tail, caviar and what I originally thought was poop splattered everywhere. Cleaning the meat from the tail was pretty nauseating. Cleaning out the guts and stuff from the body while trying not to crack the shell was pretty gross too. Maybe it's time to become a vegetarian again.. :(
The source code below can be assembled with naken_asm.
Related Projects @mikekohn.net
| Food: | RC Food, PANCAKE-ROM, Cyborg Chicken, Cyborg Lobster, Edible MIDI Keyboard |
Video
Here's a video of the lobster crawling around my basement. The second part of the video is a montage of pictures chronologically showing the lobster being assembled. https://youtu.be/G82USZRG6oM
Explanation
Since I had two lobsters I was originally thinking of making them "fight" but after cleaning out the first lobster I decided to just eat the second one and throw it away. After carefully cleaning out the shell, I wanted to make sure any left over flesh wouldn't smell so I put the shell back in the toaster oven at low heat for about 40 minutes. A few days later I glued the lobster back together using a hot glue gun. To make the claws moveable, I cut the ends off of two balloons and wrapped them around the arms. I put glue both between the balloons and the arms and on the balloons and the body. The claws were glued to the top of the servos. The lobster sits on a wooden structure with small geared motors taped to the bottom and casters glued to the front.
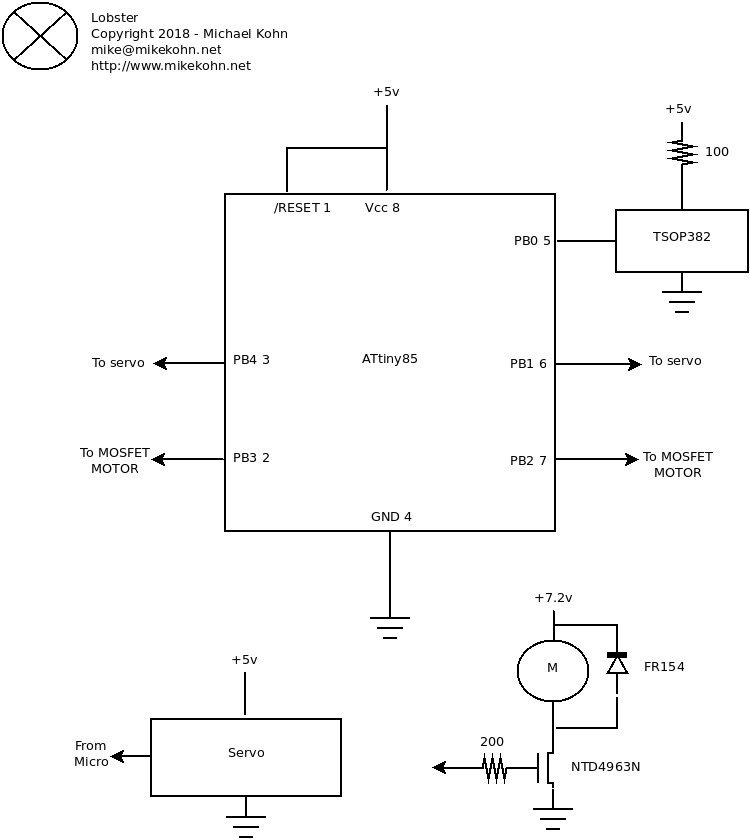
For the circuit I thought about using the same board that I used in the Cyborg Chicken Fight and Electric Cat Fight (dolls, not cats), but the board was really too big. I had one blank circuit board left that was small enough to fit inside the body of the lobster, although in the end I decided to leave it under the body. I picked an Atmel ATtiny85 because it can run on 5v and I figured that would allow me to get away with having just one 5v regulator with a 6v AAA battery pack. It helped also that it was a nice small 8 pin device.
After putting the circuit together, I programmed it to understand commands from a Syma S107 IR helicopter controller. Since this circuit only has 2 MOSFETs to control the motors, it's only possible to move forward, rotate left, and rotate right. The circuit worked fine with the motors, but when I hooked up the servos it would go nuts. I looked up the specs on the servos and came to the conclusion they were probably starving the 4 AAA batteries. I tried 4 AA batteries, which helped, but still was clunky, so I ended up dropping another 5v regulator on the board and ran it with a 7.2v LiPO. The regulator for the servos got really hot so I dropped a heatsink on it to help.
Parts List
100:1 Micro Metal Gear motor
Pololu Wheel 40x7mm Pair - Red
Power HD Mini Servo HD-1711MG
NTD4963N MOSFSET
Atmel ATtiny85
7.2v LiPO battery
SB300 PC Board
Pictures
Source code
lobster.asm
lobster_ir_comm.asm
Copyright 1997-2026 - Michael Kohn
